 YetAnotherRaspberryPiFanpage
YetAnotherRaspberryPiFanpage
Motor connection and test.
Board

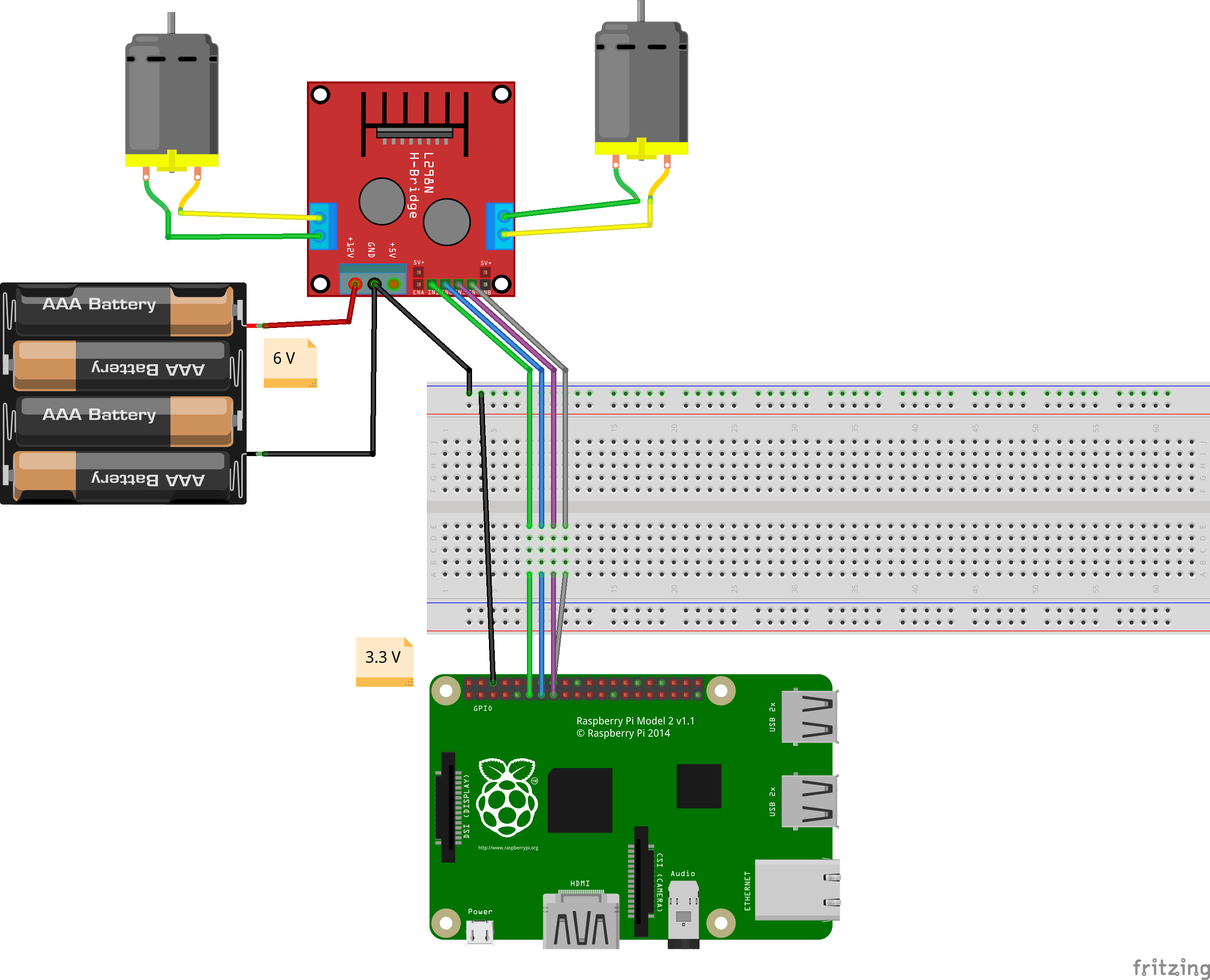
Made with Fritzing
Code
#!/usr/bin/env python
import RPi.GPIO as gpio
import time
gpio.setmode(gpio.BOARD)
PIN_IN1 = 16
PIN_IN2 = 15
PIN_IN3 = 13
PIN_IN4 = 11
gpio.setup(PIN_IN1, gpio.OUT)
gpio.setup(PIN_IN2, gpio.OUT)
gpio.setup(PIN_IN3, gpio.OUT)
gpio.setup(PIN_IN4, gpio.OUT)
def adelante(x):
gpio.output(PIN_IN1, False)
gpio.output(PIN_IN2, True)
gpio.output(PIN_IN3, False)
gpio.output(PIN_IN4, True)
time.sleep(x)
def atras(x):
gpio.output(PIN_IN1, True)
gpio.output(PIN_IN2, False)
gpio.output(PIN_IN3, True)
gpio.output(PIN_IN4, False)
time.sleep(x)
def left(x):
gpio.output(PIN_IN1, False)
gpio.output(PIN_IN2, True)
gpio.output(PIN_IN3, True)
gpio.output(PIN_IN4, False)
time.sleep(x)
def right(x):
gpio.output(PIN_IN1, True)
gpio.output(PIN_IN2, False)
gpio.output(PIN_IN3, False)
gpio.output(PIN_IN4, True)
time.sleep(x)
print 'Adelante'
adelante(2)
print 'Atras'
atras(2)
print 'Left'
left(2)
print 'Right'
right(2)
gpio.cleanup()
print
print 'finished =;)'
Download
- Fritzing: motors.fzz
- Fritzing: motors-leds.fzz